1New York University,2Adobe Research,3University of Victoria †Joint last authors
ACM Transactions on Graphics (SIGGRAPH), 2023
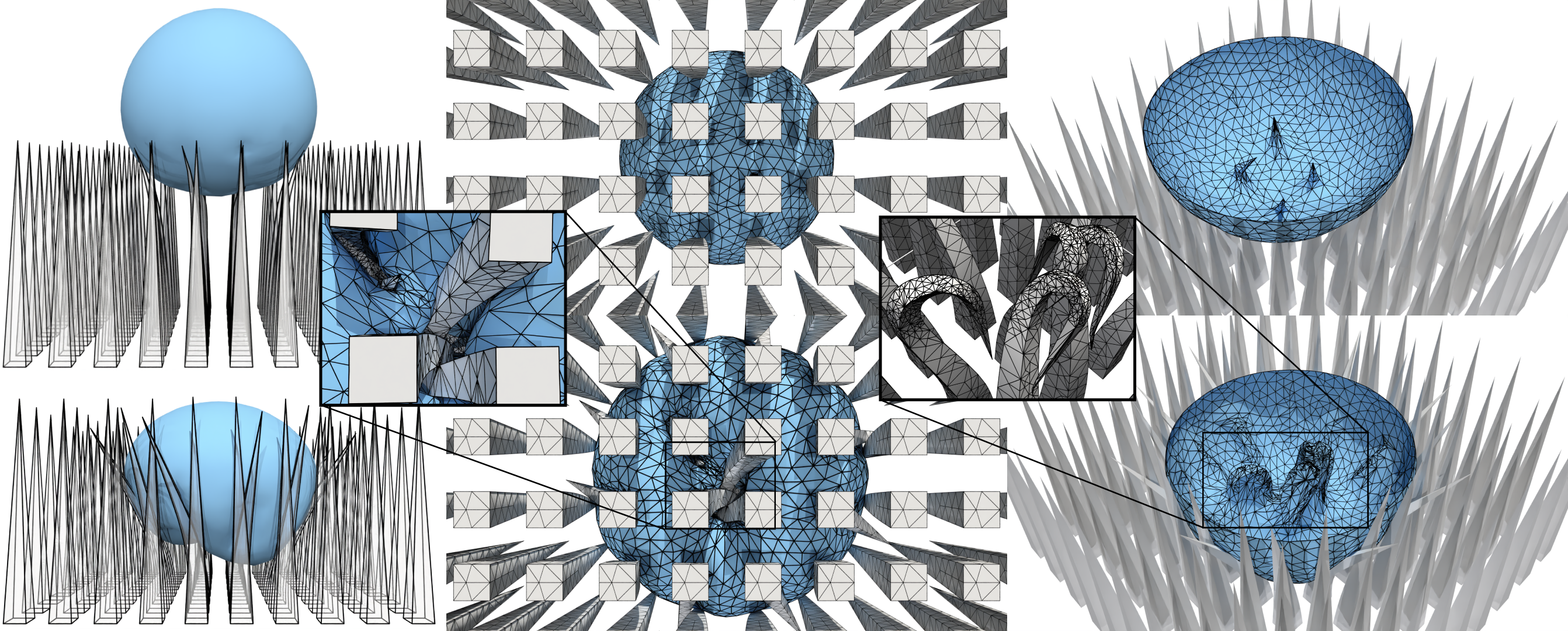
Ball-on-spikes.
In-Timestep Remeshing enables physics-aware adaptive refinement and coarsening
to robustly capture detailed contact-driven deformations in simulated trajectories.
Here we drop a soft (neo-Hookean material, E=1e5 Pa) ball at large time step
(h=0.01 s) onto very stiff (E=1e8 Pa) sharp spikes. Starting with coarse, unstructured
finite-element meshes for all geometries we show here two later steps in the trajectory
as the ball (Top left) initially collides with and then (Bottom left) comes to rest on the
spikes. (Middle and Middle Inset) Views from below for each of these steps highlight how
our physics-aware remeshing automatically and locally adapts the tetrahedral mesh in time
to capture the changing detailed deformations within the material and at contact regions.
(Right) In a cutaway view we remove the tetrahedral interior elements from the ball,
leaving just its bottom surface mesh faces to highlight how In-Timestep Remeshing tightly
conforms, per time step, without intersection, to the sharp and challenging contacts
without over-refining (please compare to the sizing field method in Figure 2b of the paper).
(Right Inset) Correspondingly we cut the ball geometry from the view altogether and zoom
in on the tightly wound spike geometries that form the severe indentation on the ball,
evidencing the accurate solution of ill-conditioned time step that balances
forces between highly disparate material stiffnesses.
We propose a fully coupled, adaptive meshing algorithm for contacting elastodynamics where remeshing steps are
tightly integrated, implicitly, within the time-step solve. Our algorithm refines and coarsens the domain
automatically by measuring physical energy changes within each ongoing time-step solve. This provides consistent,
efficient, and productive remeshing that, by construction, is physics-aware and so avoids the errors,
over-refinements, artifacts, per-example hand-tuning, and instabilities commonly encountered when remeshing in
time-stepping methods. Our in-time-step computation then ensures that each simulation step's output is both a
converged, stable solution on the updated mesh, and a temporally consistent trajectory with respect to the model
and solution of the last time step. At the same time, the output is guaranteed safe (intersection- and inversion-free)
across all operations. We demonstrate applications across a wide range of extreme stress tests with challenging
contacts, sharp geometries, extreme compressions, large time steps, and wide material stiffness ranges – all scenarios
well-appreciated to challenge existing remeshing methods.
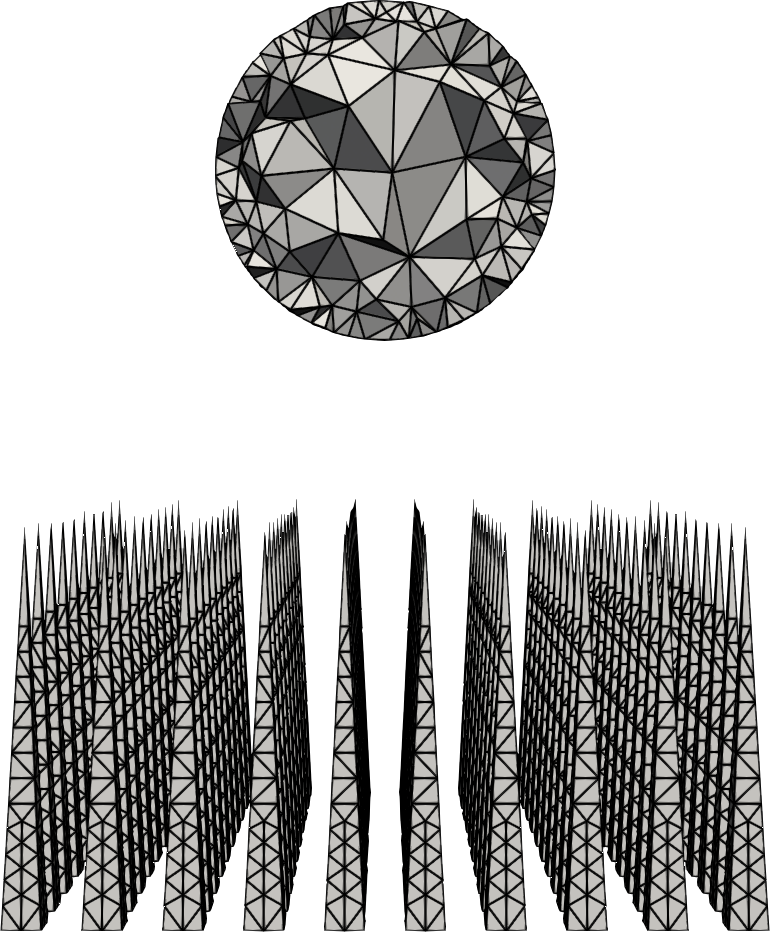
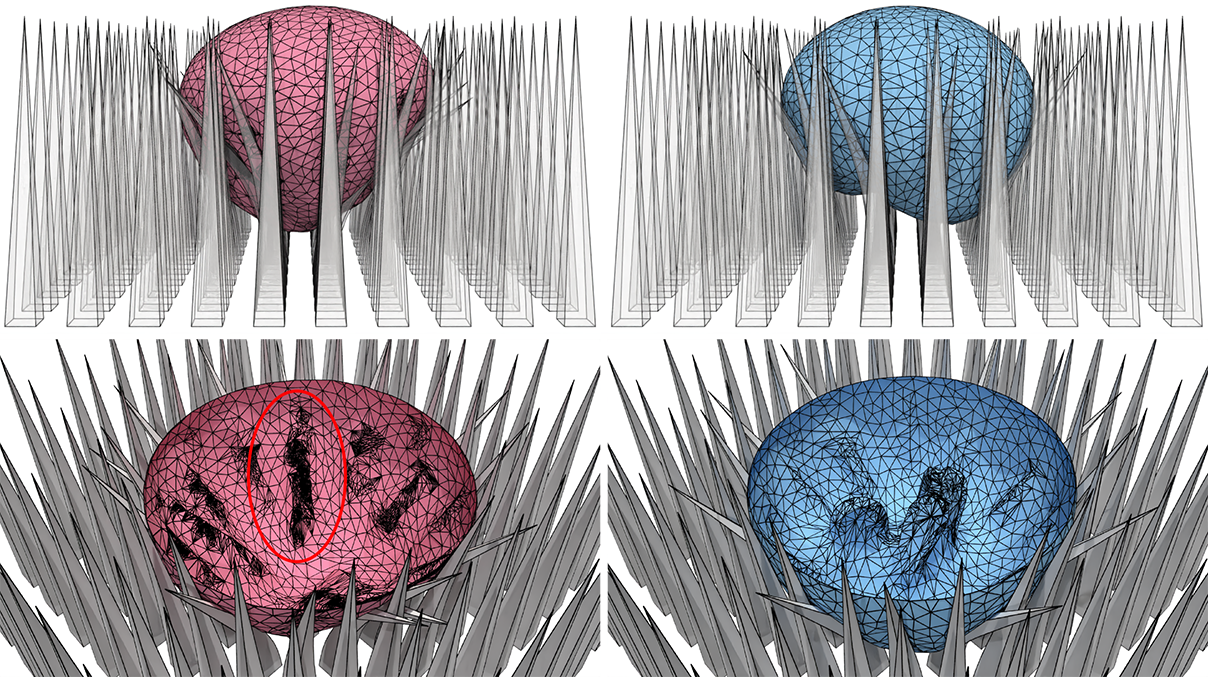
Sizing field comparison.
(a) The initial conditions and mesh used for the “ball on spikes” simulations. (b) A comparison of our algorithm (right)
and results of applying a contact-aware sizing field-based adaptive meshing criteria [Li et al. 2018; Narain et al. 2012;
Wicke et al. 2010] (left) for in-timestep simulation. We show a cutaway view (bottom row) where we have clipped the geometry
to see the inside of the sphere’s surface. While the sizing field result refines around the contacts, it severely over-refines
right away (circled in red) and so fails to capture intricate interactions. In comparison, our method adaptively updates while
tracking both contact and internal forces and so locally refines to capture the spikes pushing into the ball (see Figure 1 for
a closer view of our results).
t = 0 s
t = 1.05 s
t = 2 s
t = 3.66 s
UR 1
Ours
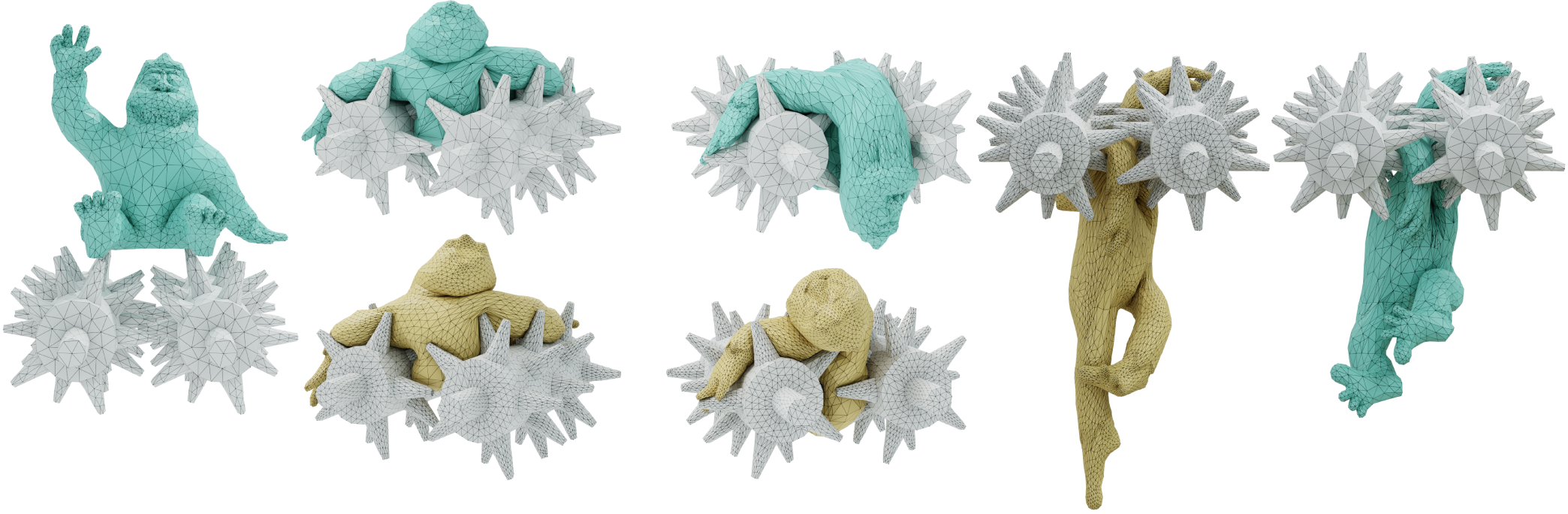
Gorilla rollers.
A very soft gorilla model (𝐸 = 2e4 Pa) is dropped on a pair of stiff rotating elastic rollers (𝐸 = 2e8 Pa) with softer spikes
(𝐸 = 2e7 Pa). As the gorilla impacts the spikes, the mesh is refined to account both for the large elastic forces in thin features
and for the rapidly changing contact forces. Our method adapts to the different material stiffness, by refining the softer gorilla in
the necessary regions of contact, much less for the stiffer spikes, and leaves the even stiffer roller unadapted. The dynamics for the
single-level uniformly-refined (UR) solution (UR 1) is comparable up to 𝑡 = 2 s where the spike is (unlike the adapted mesh solution)
is unable to push into the gorilla’s left shoulder.
Change in energy.
For each timestep of the impacting ball simulation (Figure 8 in the paper), we plot the number of splits (green bars), the number of collapses
(orange bars), and the change in energy (blue line) from the initial solve of the timestep (prior to remeshing operations) via
minimization of 𝐸 to the final solution of the timestep on the final updated mesh. Key times in the simulation are indicated by
virtual lines: (a) first contact, (b) maximal compression, (c) rebound of the material as peels away, and (d) complete separation.
The plot shows significant improvements (decrease) in the energy as we apply splitting operations, and at the same time, the
coarsening operations do not negatively affect the energy, while increasing efficiency.
BibTex
@article{Ferguson:2023:InTimestepRemeshing,
title = {In-Timestep Remeshing for Contacting Elastodynamics},
author = {Zachary Ferguson and Teseo Schneider and Danny M. Kaufman and Daniele Panozzo},
month = aug,
year = 2023,
journal = {ACM Transactions on Graphics (SIGGRAPH)},
volume = 42,
number = 4,
articleno = 145
}