Ph.D. Dissertation, New York University, 2023
Summary:
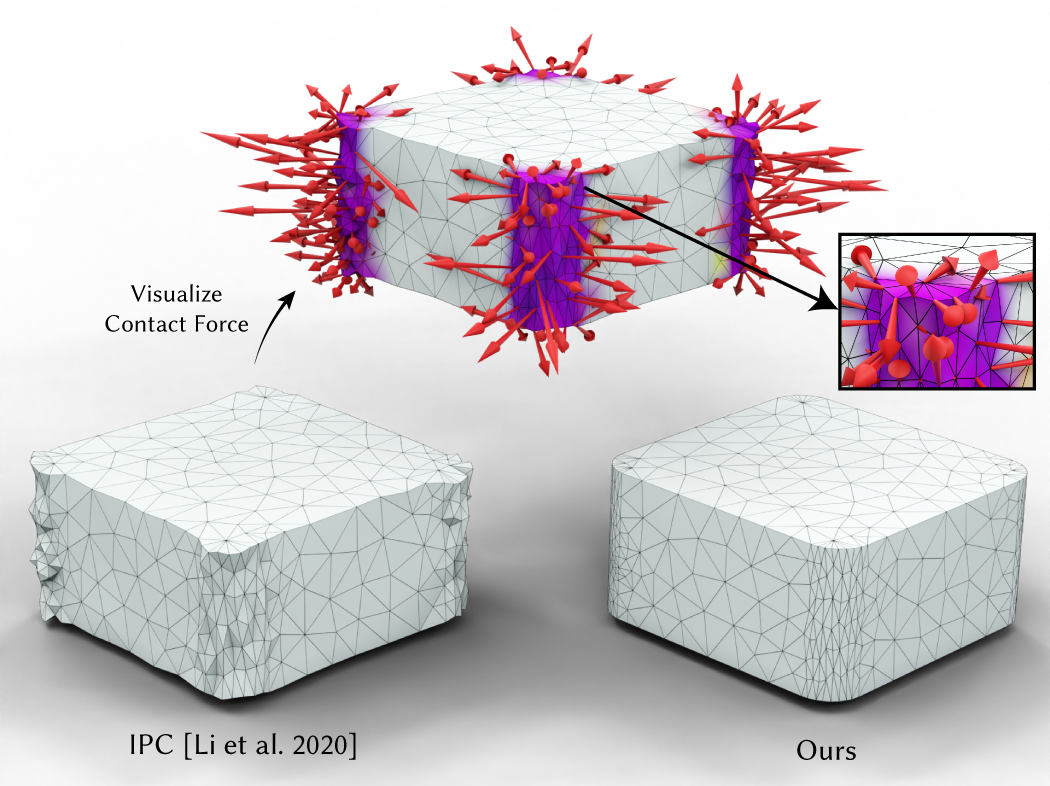
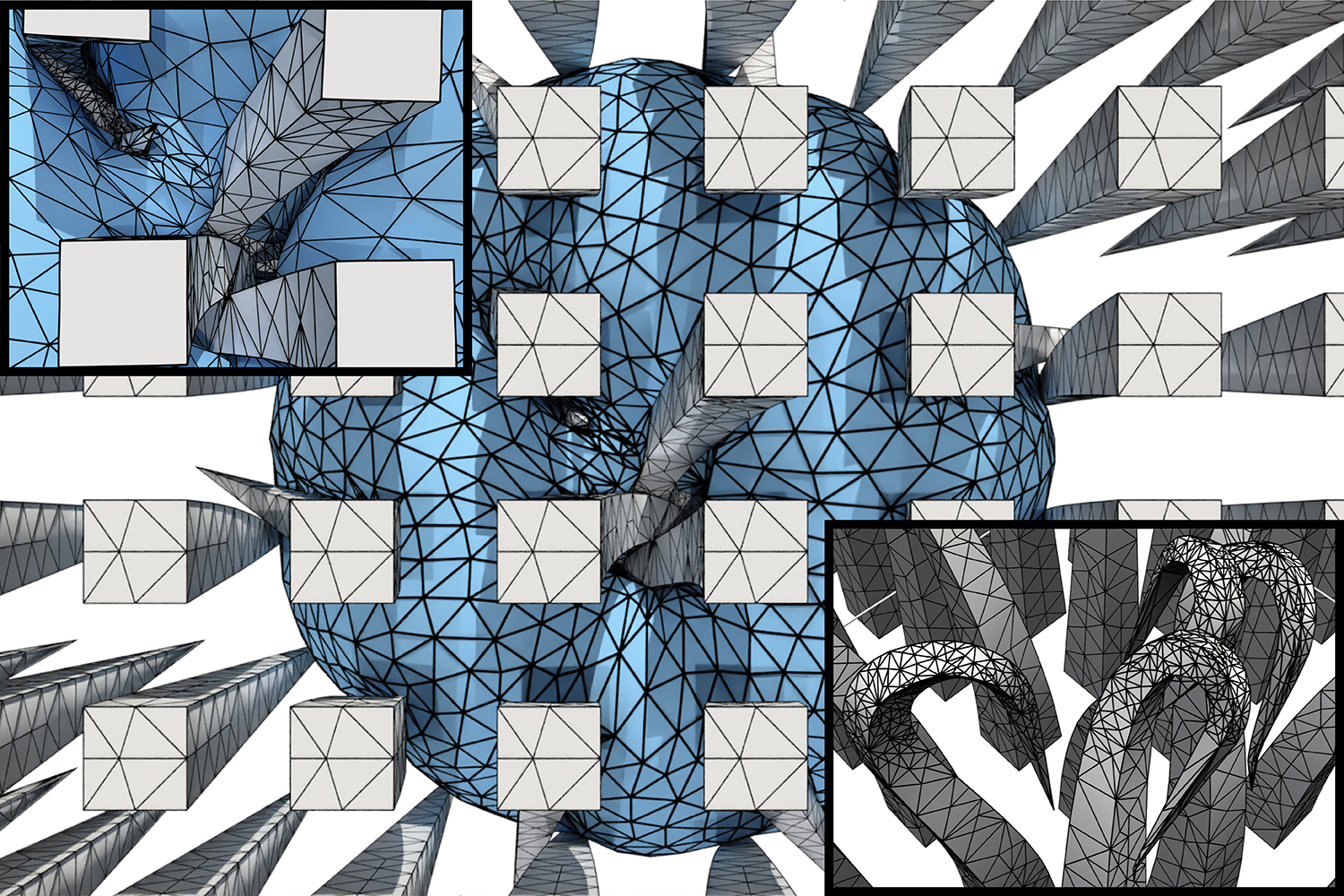
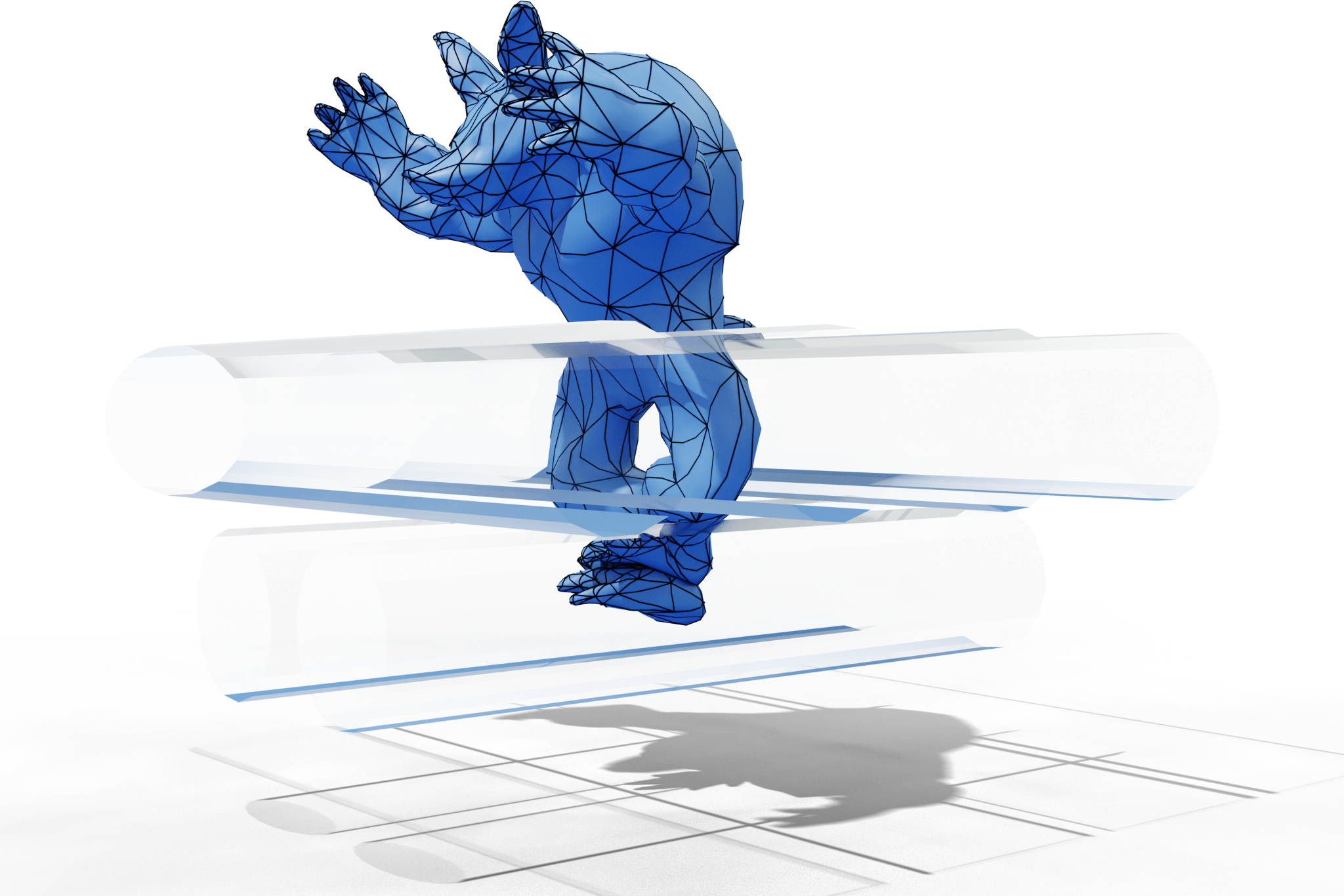
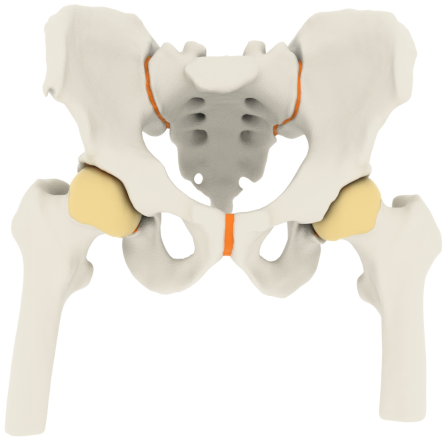
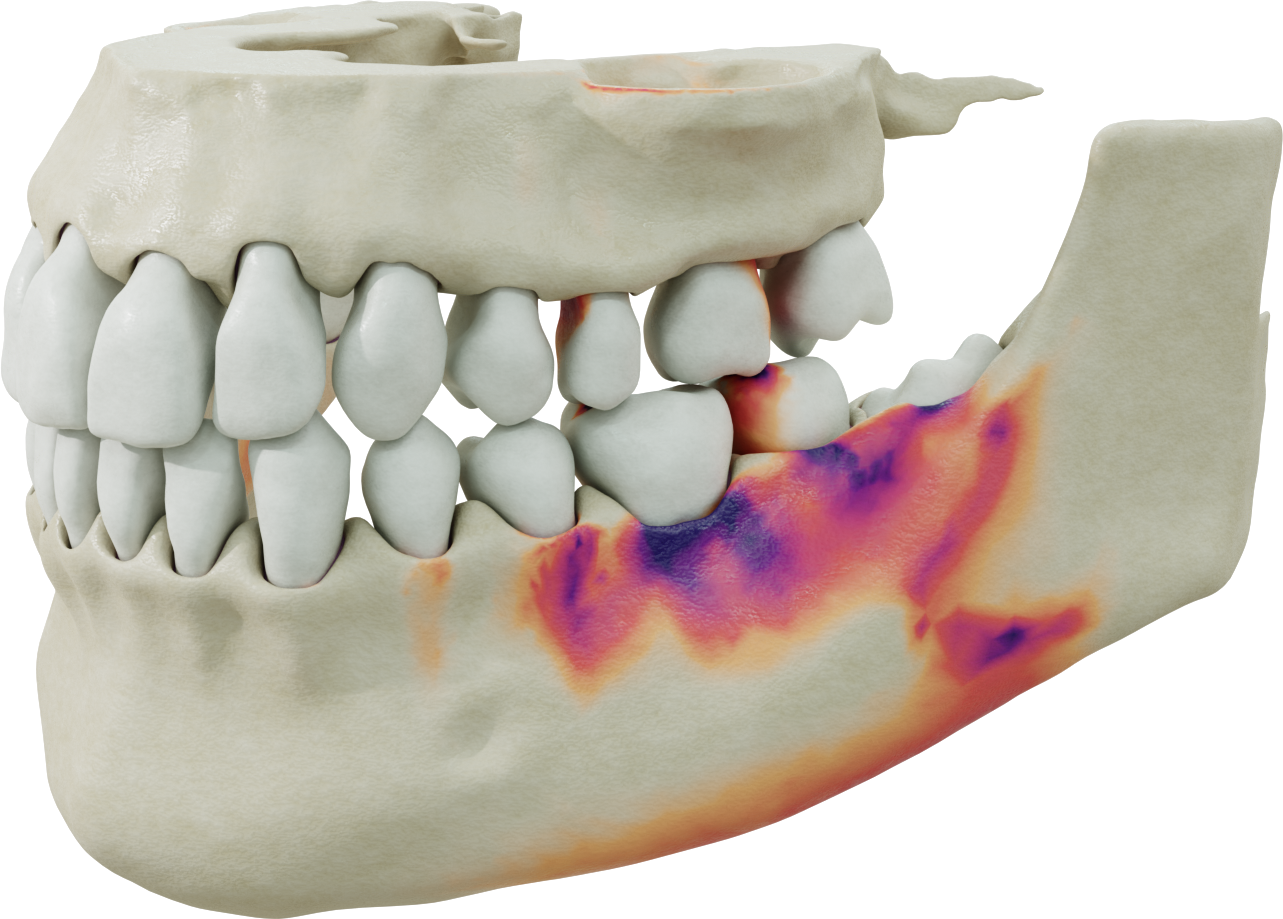
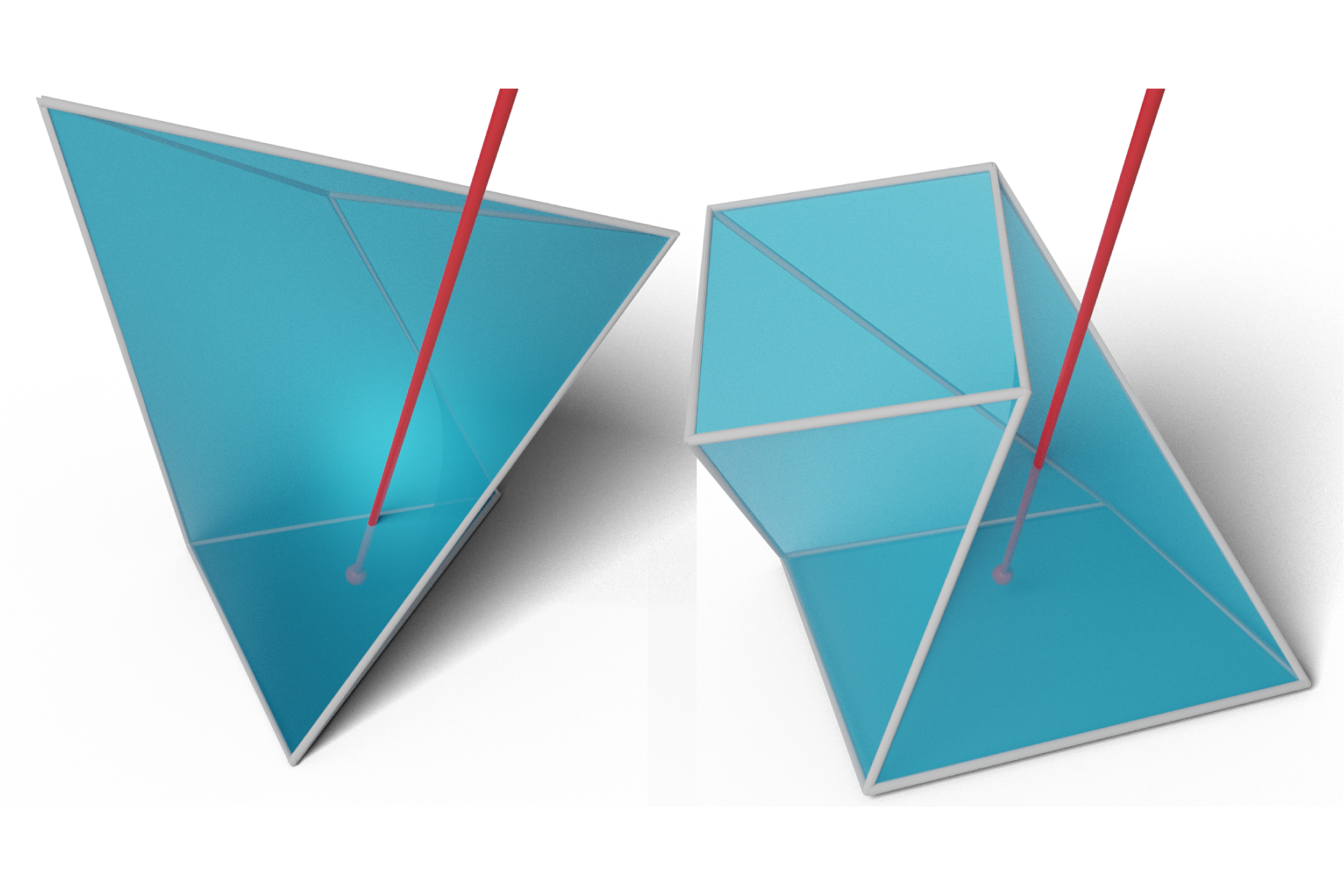
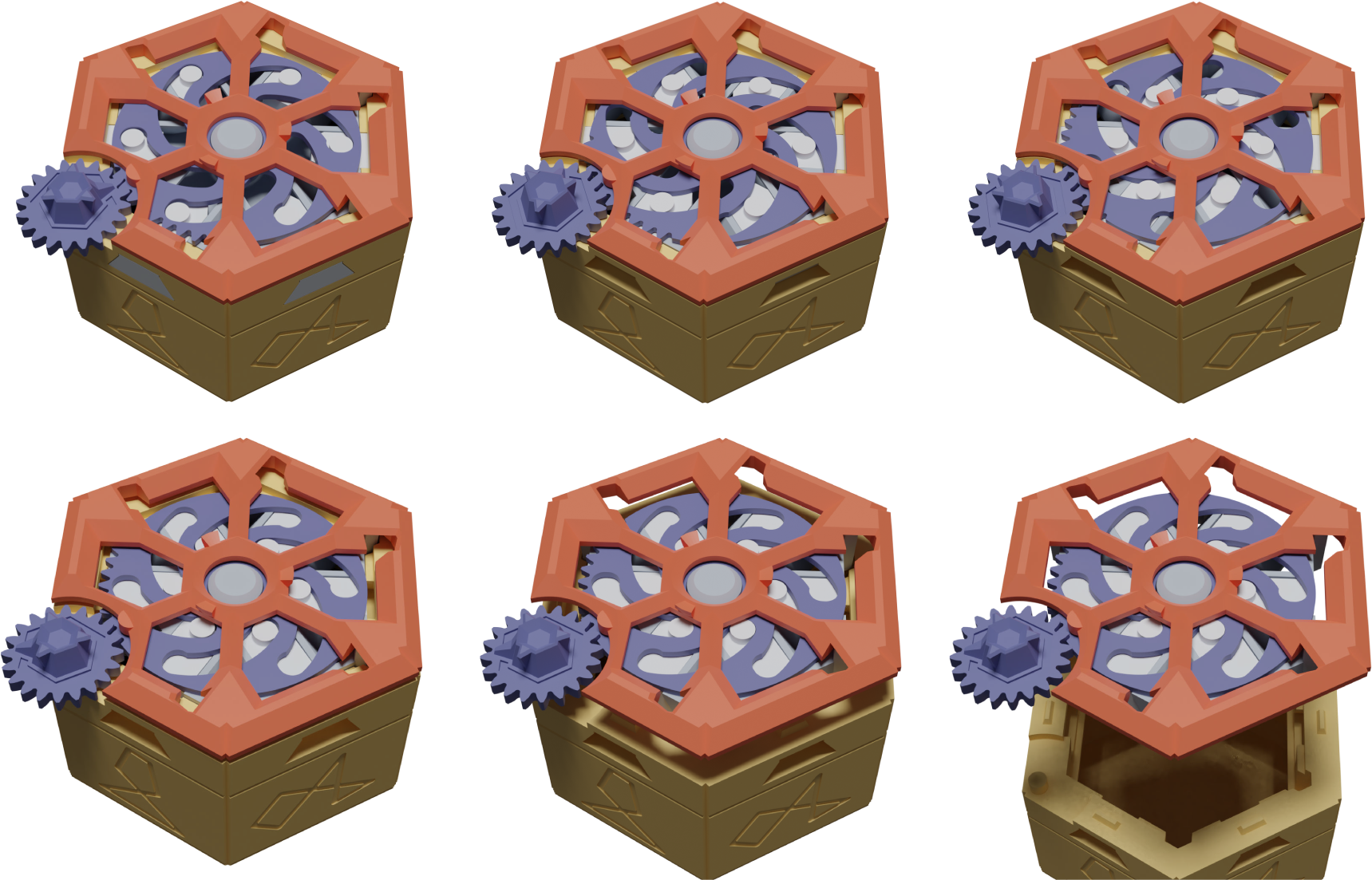
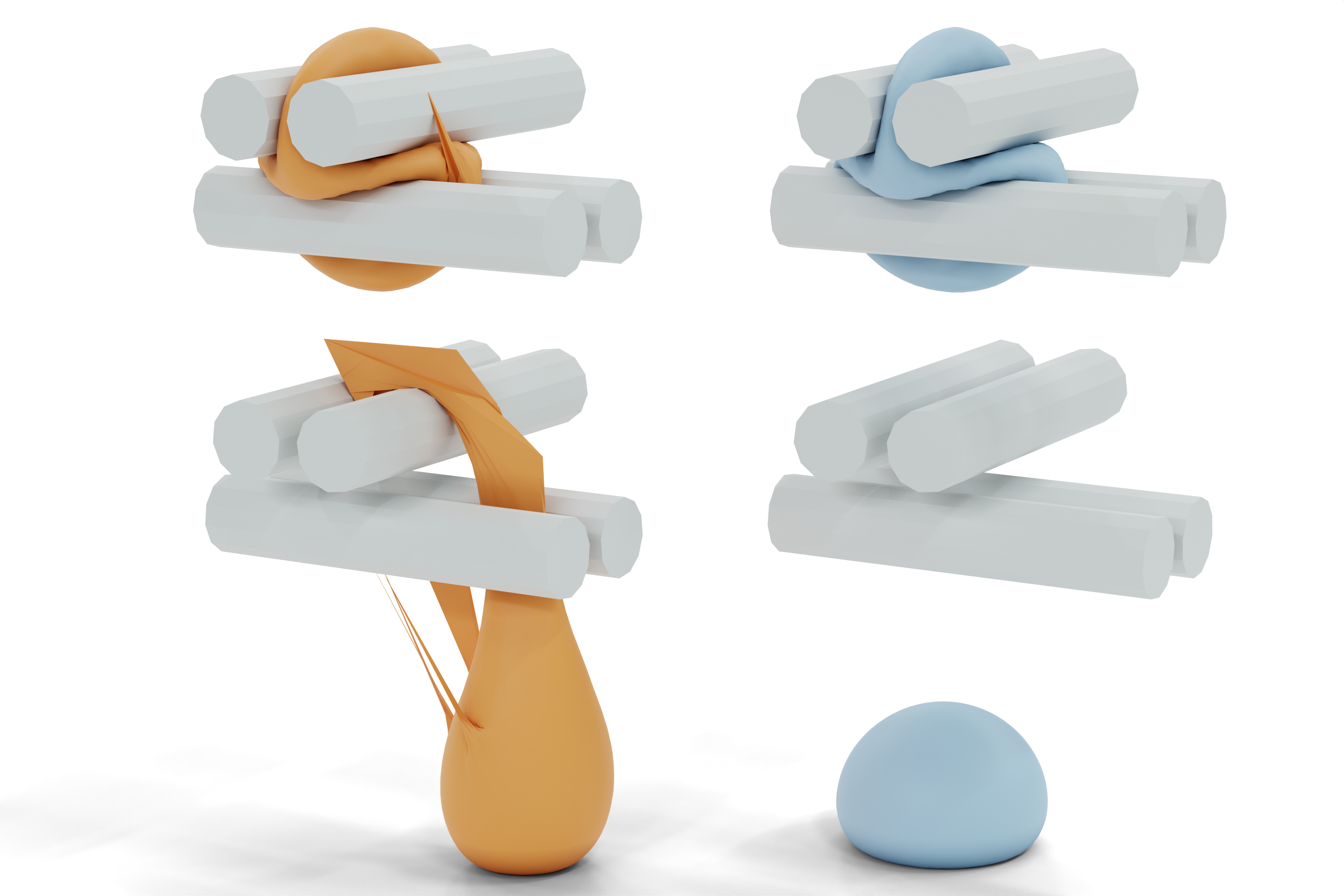
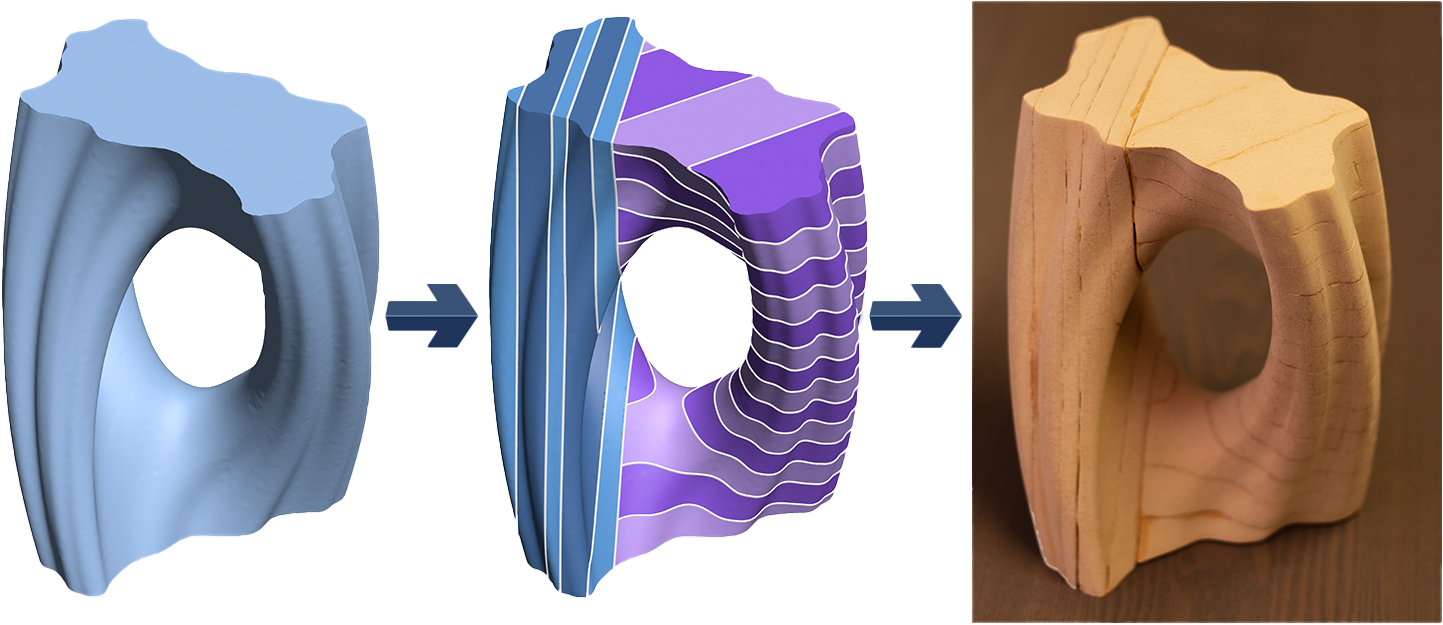
In this thesis, we introduce Incremental Potential Contact (IPC), the first simulation algorithm for deformable and rigid bodies that is efficient, accurate, and unconditionally robust. To verify these claims, we evaluate the efficiency and correctness of Continuous Collision Detection (CCD) algorithms and introduce the first provably correct and efficient algorithm. For improved accuracy and efficiency, we extend IPC to curved meshes and high-order bases and introduce the first physically-based adaptive meshing strategy.